

今回は、これまでの「まとめ」。
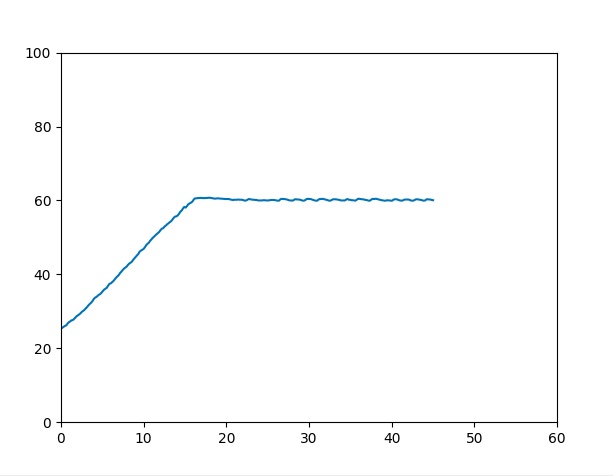
左図は、PWMのDuty比50%で熱し、60℃以上になったら止める、を繰り返し。
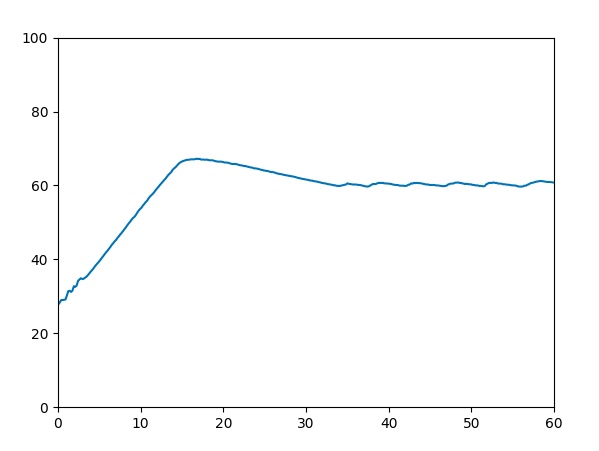
右図は、PID_v1_bcの「オートマチック」でPWMの出力を自動調整した結果。
設定温度は60℃、横軸は時間(分)、縦軸は水温(℃)
【結 果】=【結 論】
1.どう見てもPIDの「自動」は荒い。PIDの各パラメータを調整して左図程度にするのも面倒くさい。
2.で、左図の「Duty比50%のPWMで熱し、60℃未満までオン、それ以上でオフ」を繰り返すのが良策。
今回は、これまでの「まとめ」。
左図は、PWMのDuty比50%で熱し、60℃以上になったら止める、を繰り返し。
右図は、PID_v1_bcの「オートマチック」でPWMの出力を自動調整した結果。
設定温度は60℃、横軸は時間(分)、縦軸は水温(℃)
【結 果】=【結 論】
1.どう見てもPIDの「自動」は荒い。PIDの各パラメータを調整して左図程度にするのも面倒くさい。
2.で、左図の「Duty比50%のPWMで熱し、60℃未満までオン、それ以上でオフ」を繰り返すのが良策。