

2024年11月22日。「ArduinoでPID温度制御」のつづき(その2)です。
スケッチは昨日と同じ「PWM_PID_Heater_v1_241120.ino」ですが、P, I, D のうちの I の値を変えています。
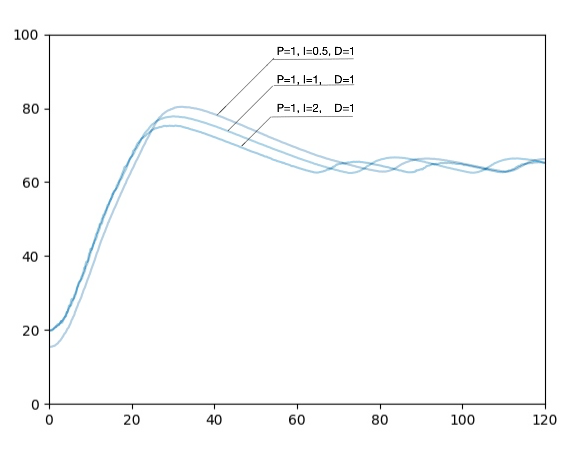
P=D=1 として、I の値を 0.5, 1 ,2 の3種類に変えた場合の温度制御グラフを下に示します。
横軸:経過時間(分)、縦軸:温度(℃)、目標温度:63℃ です。
【結果】
★ I=0.5 のグラフの初期温度が少し低いですが、3分程度左にスライドさせてると他のグラフと立ち上がりの領域が重なります。
★ I の値が大きいほど、ピークに達する時間は短くなり、オーバーシュートは小さくなるようです。
★ ハンチングは、I の値が大きいほど、周期が短くなっているようです。
★ ハンチングの上下幅はあまり変わりないようですが、良く分かりません。
★ ハンチングの始まり時期は、オーバーシュートが小さいほど当然早くなっていますね。